¶ Beschreibung
 |
 |
 |
 |
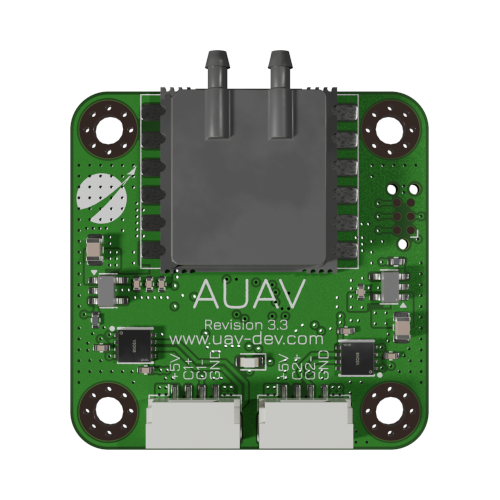
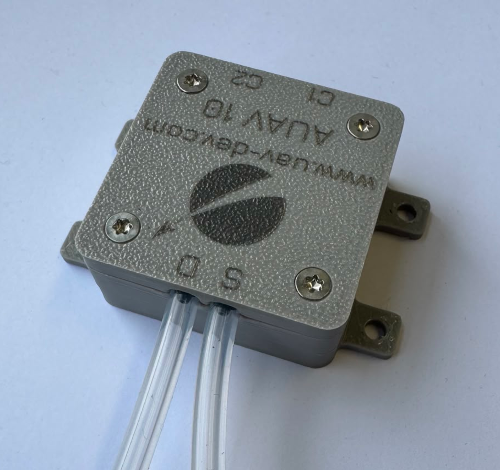
Der DroneCAN Airspeed & Baro Sensor ist ein DroneCAN Sensorknoten für unbemannte Luftfahrzeuge (UAVs), der präzise differenziellen Druck (Airspeed) sowie statischen Druck (Barometer / Höhenmessung) erfasst.
¶ Präzise Messung
- Differenzieller Druck zur exakten Bestimmung der Fluggeschwindigkeit (Airspeed)
- Statischer Druck für zuverlässige Höhen- und Barometermessungen
¶ Maximale Ausfallsicherheit dank Redundanz
Der Sensor verfügt über einen redundanten DroneCAN-Anschluss und kann gleichzeitig über zwei unabhängige Busleitungen mit dem Autopiloten verbunden werden.
Dies sorgt für eine echte Kommunikationsredundanz:
- Parallele Anbindung an zwei DroneCAN-Busse
- Fortlaufende Kommunikation auch bei Kabelbruch oder Ausfall einer Busleitung
Deutlich erhöhte Systemsicherheit für sicherheitskritische UAV-Anwendungen
¶ Entwickelt & gefertigt in Deutschland
Der DroneCAN Airspeed & Baro Sensor Node wurde vollständig in Deutschland entwickelt und hergestellt. Damit steht er für:
- Höchste Qualitätsstandards
- Zuverlässige industrielle Fertigung
Langlebigkeit und reproduzierbare Performance
¶ Vorteile auf einen Blick
- Kombinierter Airspeed- und Baro-Sensor in einem kompakten Node
- Redundante DroneCAN-Kommunikation für maximale Betriebssicherheit
- Nahtlose Integration in gängige Autopiloten
- „Engineered & Made in Germany“
Dieser Sensor ist die ideale Wahl für professionelle UAV-Systeme, bei denen präzise Flugdatenerfassung, Redundanz und Zuverlässigkeit oberste Priorität haben.
¶ Messbereich
| Sensorbereich | m/s | km/h | kt |
| 5 inH₂O | 45,1 | 162,3 | 87,7 |
| 10 inH₂O | 63,8 | 229,6 | 123,9 |
| 30 inH₂O | 110,5 | 397,6 | 214,7 |
| 60 inH₂O | 156,2 | 562,3 | 303,6 |
| 100 inH₂O | 201,7 | 726,0 | 392,0 |
¶ Steckerbelegung
 |
 |
¶ CAN1
JST-GH 4 Pin
| Pin | Signal |
| 1 | +5V |
| 2 | CAN1_H |
| 3 | CAN1_L |
| 4 | GND |
¶ CAN2
JST-GH 4 Pin
| Pin | Signal |
| 1 | +5V |
| 2 | CAN2_H |
| 3 | CAN2_L |
| 4 | GND |
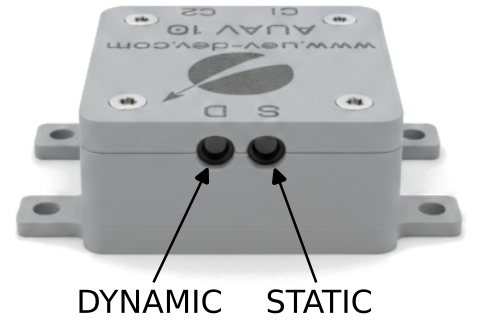
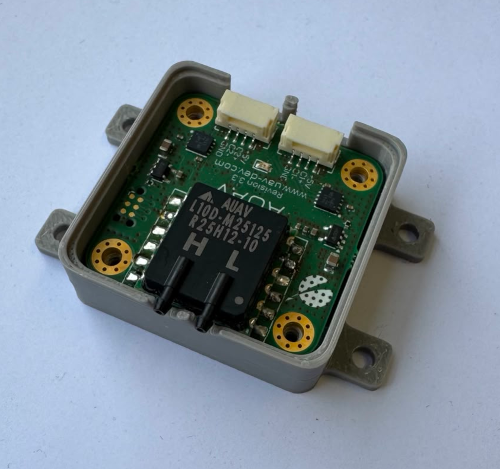
¶ Pitot Anschluss
Die Schläuche des Pitotrohrs werden im Gehäuse leicht geklemmt, damit sie zusätzlich gesichert sind. Für die Montage gehen Sie folgendermaßen vor.
| TX8-Schrauben lösen | Gehäuse öffnen | Schläuche aufstecken | Gehäuse schließen und verschrauben |
 |
 |
 |
 |
¶ Kompatibilität
| ArduPilot | ja |
| PX4 | ja |
¶ Konfiguration
¶ ArduPilot
¶ DroneCAN (Nicht-redundante Kommunikation)
| Parameter | Wert |
| CAN_P1_DRIVER | 1 (First driver) |
| CAN_D1_PROTOCOL | 1 (DroneCAN) |
¶ DroneCAN (Redundante Kommunikation)
| Parameter | Wert |
| CAN_P1_DRIVER | 1 (First driver) |
| CAN_D1_PROTOCOL | 1 (DroneCAN) |
| CAN_P2_DRIVER | 1 (First driver) |
| CAN_D2_PROTOCOL | 1 (DroneCAN) |
¶ Airspeed
| Parameter | Wert |
| ARSPD_USE | 1 (Use) |
| ARSPD_TYPE | 8 (DroneCAN) |
¶ PX4
¶ DroneCAN
| Parameter | Wert |
| UAVCAN_ENABLE | 2 (Sensors Automatic Config) |
¶ Airspeed
| Parameter | Wert |
| UAVCAN_SUB_ASPD | 1 (Enable) |
| UAVCAN_SUB_DPRES | 1 (Enable) |
¶ Barometer (Optional)
| Parameter | Wert |
| UAVCAN_SUB_BARO | 1 (Enable) |
¶ GPL-Information
Dieses Produkt enthält Softwarebestandteile aus dem Open-Source-Projekt ArduPilot (GPLv3).
Quellcode und Änderungen: https://github.com/ArduPilot/ardupilot
Lizenztext: https://www.gnu.org/licenses/gpl-3.0.de.html
Das Gerät unterstützt das Aufspielen eigener Firmware.
¶ Abmessung
PCB: 33 mm x 33 mm
Gehäuse: 37 mm (53 mm mit Befestigungslaschen) x 37 mm x 16 mm
¶ Lieferumfang
DroneCAN Airspeed-Sensor im PC-FR 3D-Druck Gehäuse
¶ Bestellung
Made in Germany DroneCAN Airspeed-Sensor im UAV-DEV GmbH Webshop
DroneCAN Airspeed-Sensor im UAV-DEV GmbH Webshop
Pitot Rohr inkl. Schlauch im UAV-DEV GmbH Webshop
¶ Herkunft
| Entwicklung | DE |
| PCB | DE / CN |
| Bestückung | DE / CN |
| Konfiguration und Test | DE |
| Verpackung und Versand | DE |