¶ Beschreibung
Der USB-C zu CAN Adapter der UAV-DEV GmbH ist ein vielseitiges Entwicklungs-, Test- und Service-Tool für DroneCAN. Er verbindet einen Linux-PC oder ein Notebook über USB-C direkt mit einem DroneCAN-Bus und ermöglicht umfassende Diagnose-, Konfigurations- und Update-Funktionen – auch ganz ohne Autopilot.
Funktionen & Vorteile
- USB-C Anschluss an Linux-Systeme
Einfache Plug-and-Play-Integration, das CAN-Interface steht direkt unter Linux zur Verfügung. - Kompatibel mit DroneCAN GUI Tool
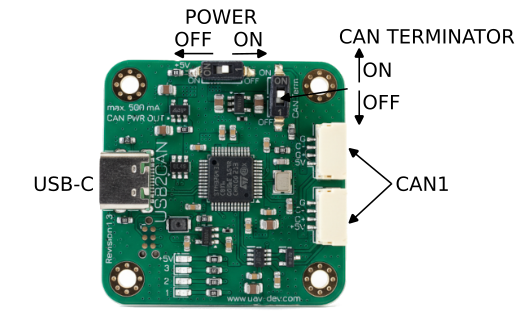
Monitoring des DroneCAN-Busses, Auslesen und Anpassen von Parametern sowie Firmware-Updates von DroneCAN-Nodes. - Schaltbarer CAN-Abschlusswiderstand
Der integrierte 120-Ω-Abschlusswiderstand kann per Schalter aktiviert oder deaktiviert werden – ideal für flexible Test- und Laboraufbauten. - Schaltbare 5-V-Busversorgung
Versorgung der DroneCAN-Leitung mit 5 V und bis zu 500 mA, ebenfalls schaltbar. Dadurch können DroneCAN-Nodes direkt über den Adapter betrieben werden. - Standardisierte Anschlüsse
Zwei JST-GH 4-Pin Steckverbinder mit standardkonformer DroneCAN-Belegung befinden sich direkt auf dem Board.
→ Standard-DroneCAN-Kabel können ohne Adapter oder Sonderanfertigungen verwendet werden. - Autopilot-unabhängiger Betrieb
Perfekt zum Testen, Konfigurieren und Aktualisieren von DroneCAN-Nodes auch ohne angeschlossenen Autopiloten.
Typische Einsatzbereiche
- Entwicklung und Debugging von DroneCAN-Geräten
- Parametrierung und Firmware-Updates von Sensoren, Aktoren und Modulen
- Produktionstests und End-of-Line-Prüfungen
- Service-, Wartungs- und Diagnosearbeiten
¶ Steckerbelegung
¶ CAN1
JST-GH 4 Pin
| Pin | Signal |
| 1 | +5V Ausgang |
| 2 | CAN_H |
| 3 | CAN_L |
| 4 | GND |
¶ Kompatibilität
| Linux | ja |
| Windows | nein |
¶ Konfiguration
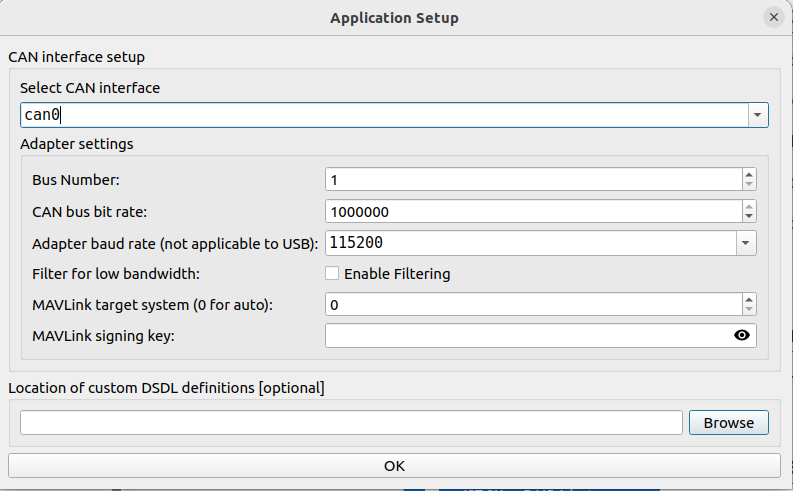
Unter Linux wird der Adapter als natives SocketCAN-Interface erkannt. Nach dem Anstecken des USB-C-Kabels muss das Interface einmalig aktiviert und konfiguriert werden.
Die Konfiguration erfolgt über die Linux-Konsole, z. B. mit:
sudo ip link set can0 up type can bitrate 1000000
Anschließend steht das CAN-Interface unter dem Gerätenamen can0 als SocketCAN-Schnittstelle unter Linux zur Verfügung und kann von allen kompatiblen Anwendungen genutzt werden.
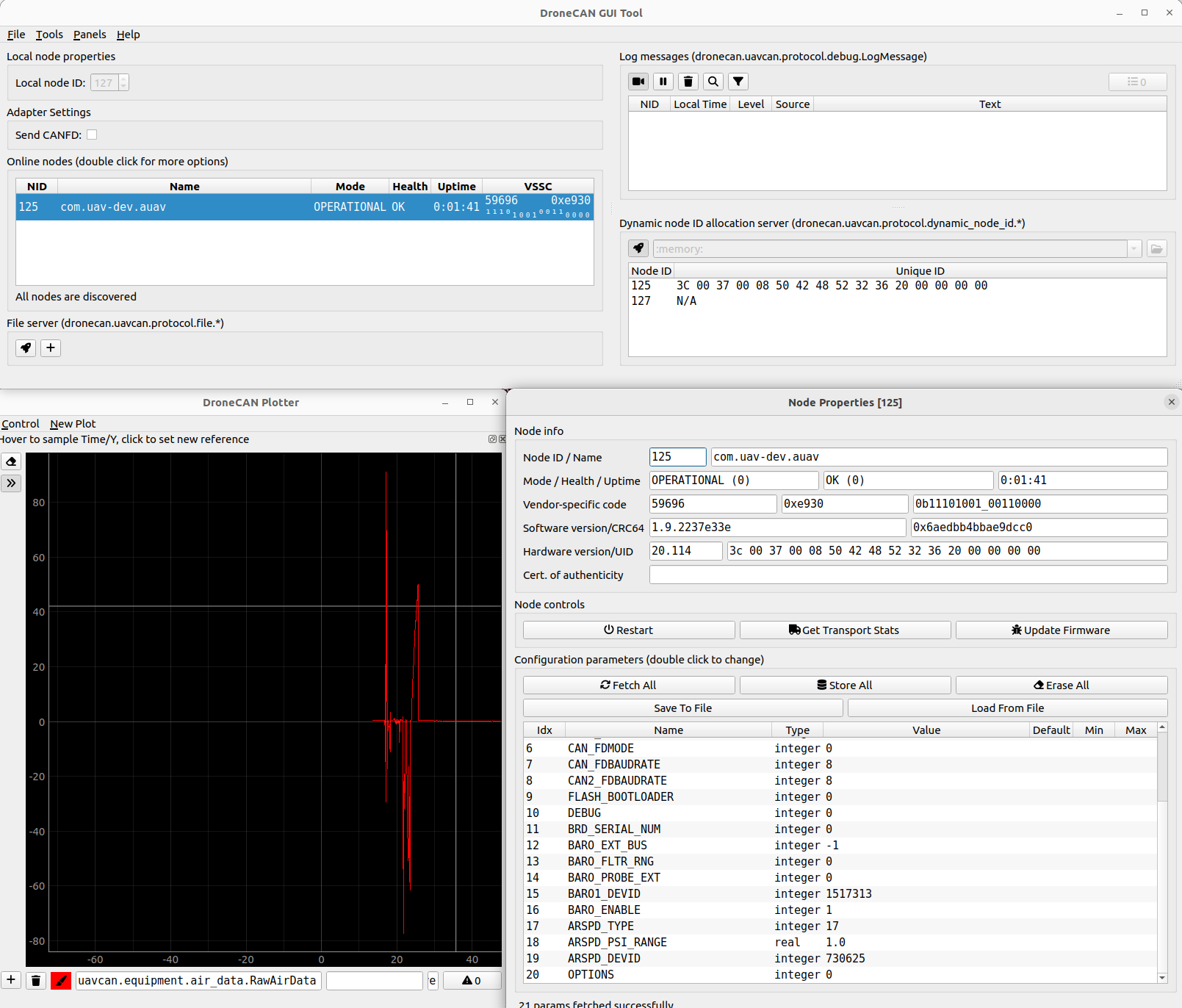
Wir empfehlen die Nutzung des DroneCAN GUI Tools in Kombination mit dem Adapter. Damit kann der DroneCAN-Bus überwacht, einzelne DroneCAN-Nodes konfiguriert sowie die Firmware der Nodes aktualisiert werden.
¶ Abmessung
38 mm x 38 mm
¶ Lieferumfang
USB2CAN Adapter Leiterkarte
¶ Bestellung
Bestellung USB2CAN Adapter im UAV-DEV GmbH Webshop
¶ Herkunft
| Entwicklung | DE |
| PCB | CN |
| Bestückung | CN |
| Konfiguration und Test | DE |
| Verpackung und Versand | DE |